本文记录《第4章 学习Shader所需的数学基础》的矩阵基础知识内容。
笛卡尔坐标系
二维笛卡尔坐标系
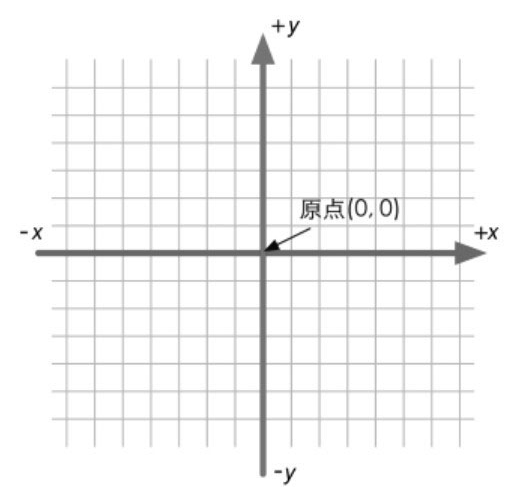
二维笛卡尔坐标系:
- 原点
- x轴、y轴(基矢量)
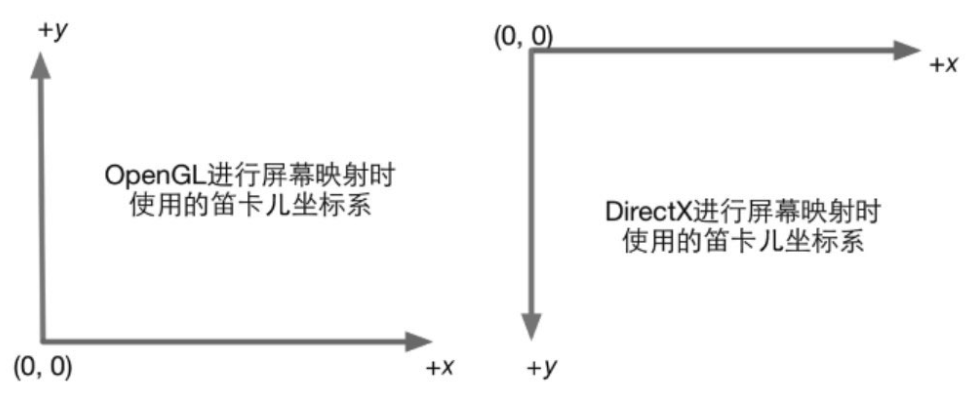
x轴、y轴朝向并非固定,如:OpenGL和DirectX使用了不同的二维笛卡尔坐标系。
三维笛卡尔坐标系
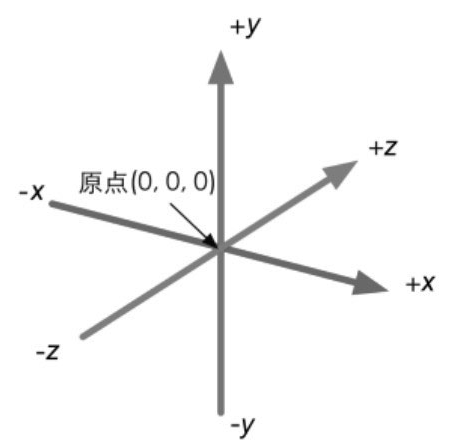
三维笛卡尔坐标系:
- 原点
- x轴、y轴、z轴(基矢量)
标准基矢量:互相垂直,且长度为1的基矢量。
正交基:互相垂直,但长度不为1的基矢量。
左手坐标系和右手坐标系
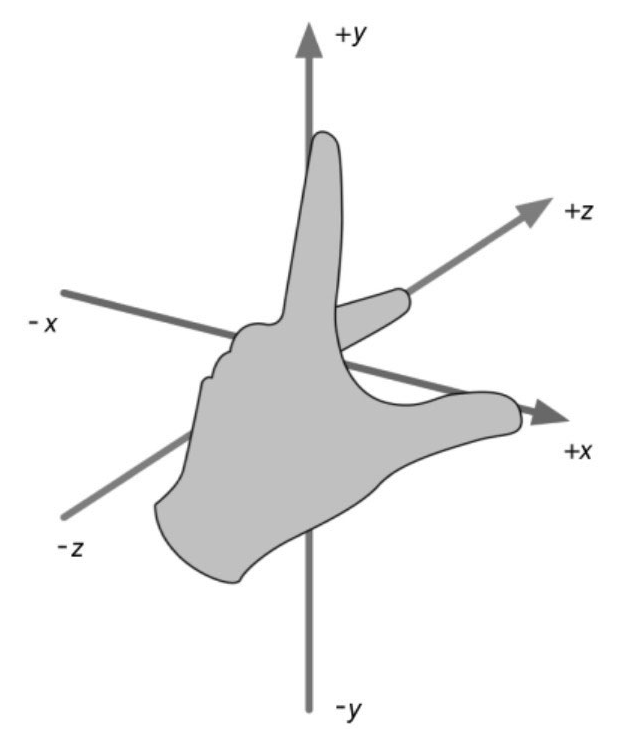
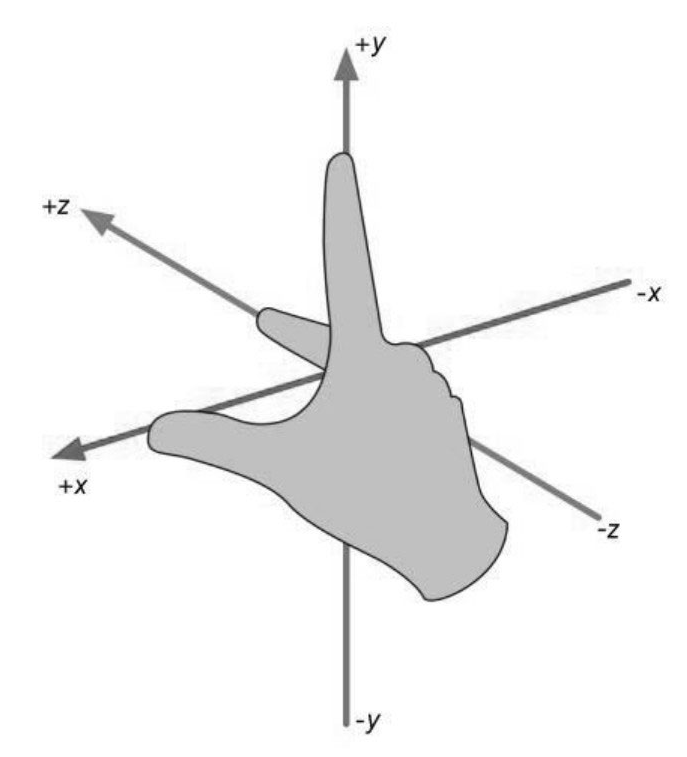
以手的大拇指作为+x轴,食指作为+y轴,中指作为+z轴,将3根手指互相垂直,可以用左手示意的坐标系,为左手坐标系:
可以用右手示意的坐标系,为右手坐标系:
左手坐标系和右手坐标系无法通过旋转实现坐标轴指向重合。
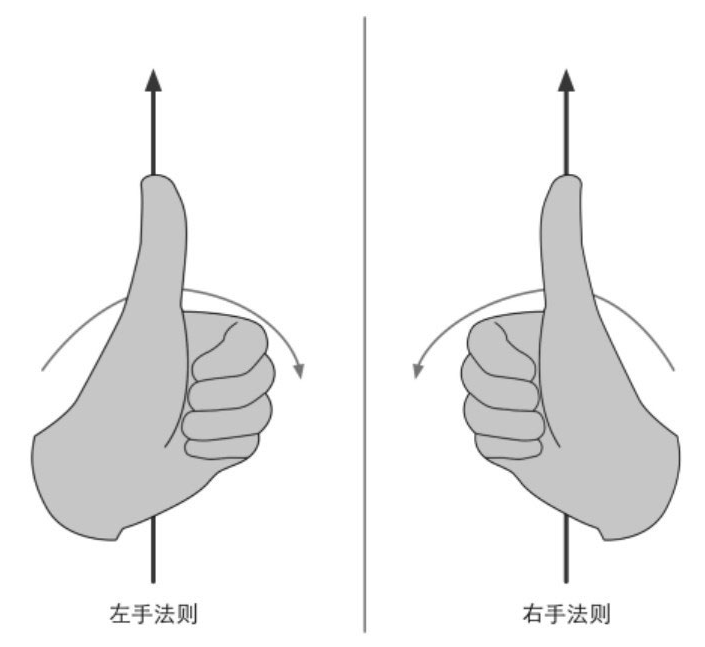
左手坐标系和右手坐标系分别对应左手法则和右手法则,用来在坐标系中定义旋转的正方向,下图4个手指指向的方向即为正方向:
Unity使用的坐标系
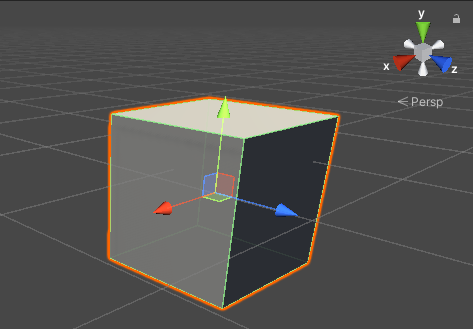
Unity的模型空间和世界空间使用的是左手坐标系,注意观看下图红、绿、蓝轴在右上角分别对应x轴、y轴、z轴:
Unity的观察空间使用的是右手坐标系。观察空间,就是以摄像机作为原点的坐标系,在这个坐标系中,摄像机的前向是z轴的负方向,与模型/世界空间的定义相反。即:z轴坐标的减少意味着场景深度的增加。

点和矢量
点是n维空间(游戏中主要是用二维、三维空间)中的一个位置,没有大小、宽度的概念。
二维空间点的表示:p = (x, y)
三维空间点的表示:p = (x, y, z)
矢量是n为空间中包含模和方向的有向线段,没有位置的概念。
矢量的模:矢量的长度,非负数。
矢量的方向:矢量在空间中的指向。
矢量的表示与点类似,v = (x, y),v = (x, y, z),v = (x, y, z, w)。
为区分点和矢量,在变量书写上,标量用小写字母表示,如:a, b, x, y, z等;矢量用小写的粗体字母表示,如:a, b, u, v等。
矢量通常有一个箭头表示:
矢量和标量的乘法/除法
标量是只有模,没有方向的量,比如:距离、速度等。
矢量无法与标量进行加减运算,但是可以进行乘法或除法运算。
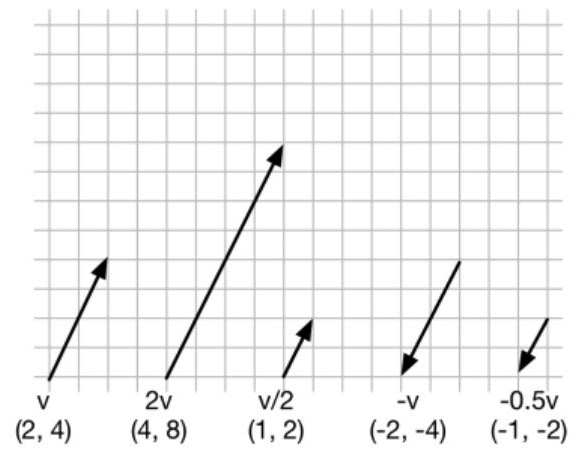
矢量与标量的乘法:kv = (kvx, kvy, kvz)
矢量可以被非0的标量除,但是矢量无法作为除数:

从几何意义上看,一个矢量v和一个标量k相乘,意味着对矢量v进行一个大小为|k|的缩放。若k<0,则矢量方向取反,如下图:
矢量的加法和减法
两个矢量加减,即:两个矢量的对应分量进行加减,公式如下:
a + b = (ax+bx, ay+by, az+bz)
a - b = (ax-bx, ay-by, az-bz)
从几何意义上看,矢量加法,即:把矢量a的头连接到矢量b的尾,然后画一条从a的尾到b的头的矢量,来得到a和b相加后的矢量,如下图所示:
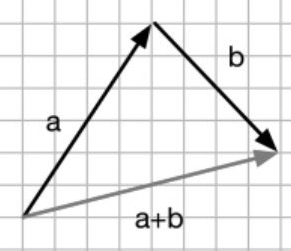
也可以理解为:一个点从a的尾进行位置偏移a,在进行位置偏移b,就等同于进行了a+b的位置偏移,这被称为矢量加法的三角形定则。
矢量的减法类似:
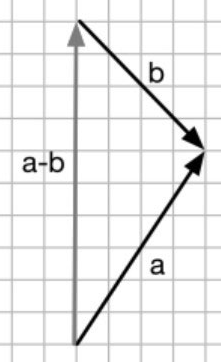
在图形学中,矢量通常用于描述位置偏移(简称位移)。我们可以利用矢量的加法和减法来计算一点相对于另一点的位移。
矢量的模
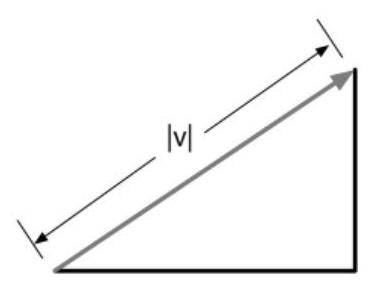
矢量的模是一个标量,可以理解为矢量在空间中的长度。表示符号通常是在矢量的两边加上竖线,比如:|v|。
三维矢量的模的计算公式:
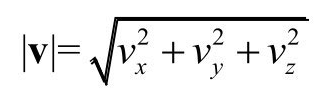
其他维度的矢量的模计算类似,都是对每个分量平方相加后开根号。几何意义,可用下图解释:
单位矢量
单位矢量指模为1的矢量,也被称为被归一化的矢量(normalized vector)。通常用在只关心方向,不关心模的矢量,比如:模型的发现方向、光源方向等。
把非零矢量转换成单位矢量的过程叫归一化。
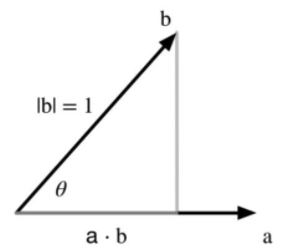
单位矢量的表示为:

单位矢量的公式:
零矢量:每个分量的值都为0的矢量,如:v = (0, 0, 0)。零矢量不能被归一化,因为除法运算时,分母不能为0。
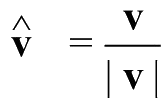
从几何意义上看,对于二维空间,单位矢量就是从圆心出发、到圆边界的矢量:
对于三维空间,单位矢量就是从圆心出发、到球面的矢量。
在Unity Shader中,会经常遇到法线方向、光源方向,这些矢量不一定是归一化后的矢量,计算的时候需要将这些矢量归一化成单位矢量。
矢量的点积
矢量的乘法有两种类型:点积(dot product)、叉积(cross product)。
矢量的点积,也叫内积。点积的运算表示:a·b,中间的点不能省略。
点积公式一:
a·b = (ax, ay, az) · (bx, by, by) = axby + ayby + azbz
点积满足交换律:
a·b = b·a
点积的几何意义:投影。
投影的值可能是负数,投影结果的正负号与a、b两个矢量的方向有关:方向相反,结果小于0;方向相同,结果大于0;方向垂直,结果等于0。
性质一:
点积可结合标量乘法
(ka)·b = a·(kb)=k(a·b)
k的几何意义是:对矢量进行缩放。
性质二:
点积可结合矢量加减法
a·(b+c) = a·b + a·c
将c换成-c就是减法的版本。
性质三:
一个矢量与自身点积的结果是该矢量模的平方
v·v = vxvx + vyvy + vzvz = |v|2
可以用矢量点积的形式来求矢量的模,Shader中常用模的平方来直接做比较或运算,目的是减少开放带来的性能消耗。
点积公式二:
a·b = |a||b|cosθ
公式二的证明:
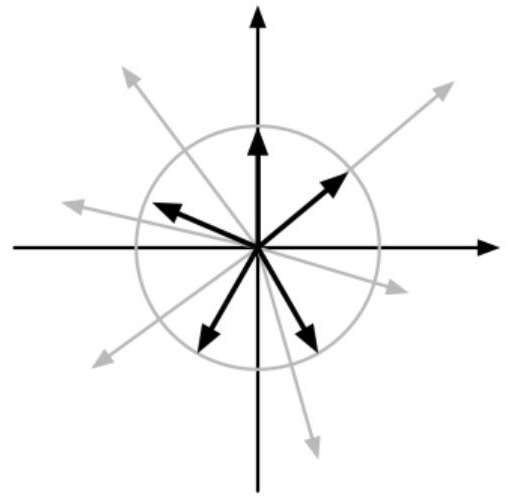
假设对两个单位矢量进行点积

如下图所示:
由上图可知,cosθ对应的直角边是:a·b的点积(b矢量在a矢量的投影),且cosθ = 直角边 / 斜边,则a·b的点积 = cosθ * 斜边,因为单位矢量b的模是1(斜边长度为1),所以:a·b的点积 = cosθ,也就是两个单位矢量的点积为夹角的cos值。
再由之前性质一,可得推导公式二:

由公式二可知,点积可用于求两个矢量的夹角:
矢量的叉积
叉积,也叫外积。与点积不同,叉积的结果仍然是矢量,而非标量。
叉积的表示:a x b,叉号不能省略。叉积的计算公式如下:
a x b = (ax, ay, az) x (bx, by, bz) = (aybz-azby, azbx-axbz, axby-aybx)
具体的记法,可以这样:
- 先看每个分量的被减数
aybz、azbx、axby,它们下标的规律是不包含当前分量下标,比如:x分量的被减数只有y、z下标,y分量的被减数只有x、z下标,z分量的被减数只有x、y下标。 - 然后看被减数中a的下标
ay、az、ax,a的下标永远是当前分量的下一个,比如:x分量的下标是y,y分量的下标是z,z分量的下标是x。 - 再看被减数中b的下标
bz、bx、by,b的下标永远和a不一样,再结合第1点记忆,b的下标不是当前分量,所以x分量b的下标只能是除了x以外的y、z的其中一个,而y被a用了,所以b的下标只能是z,其他分量的b以此类推。 - 再看每个分量的减数
azby、axbz、aybx,他们的下标就是被减数中a和b下标的互换,所以aybz的减数是azby,其他以此类推。
叉积不满足交换律,即:a x b ≠ b x a;但是叉积满足反交换律,即:a x b = - (b x a)。
叉积不满足结合律,即:(a x b) x c ≠ a x (b x c)。
叉积的几何意义:
对两个矢量进行叉积的结果,会得到同时垂直于这两个矢量的新矢量。
叉积的模
公式:
|a x b| = |a||b|sinθ
这容易联想到平行四边形求面积:
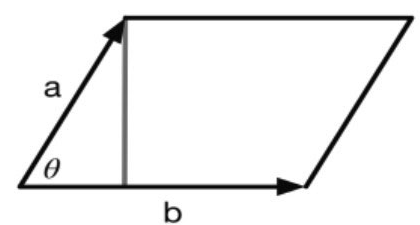
面积A = |b| h = |b| (|a| sinθ) = |a||b|sinθ
叉积的方向
从几何意义可知,两个矢量的叉积,会得到垂直于两个矢量的新矢量,但是与其垂直的有两个向量。这时前面学到的左/右手坐标系就派上用场了,它用来确定叉积得到新矢量的方向朝哪边。
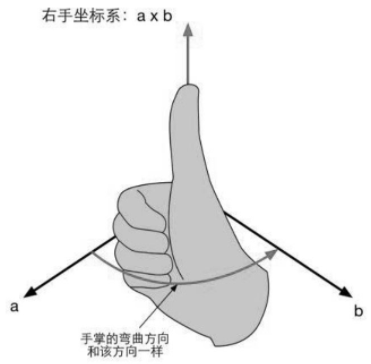
将大拇指与a同向,食指与b同向,中指指向的方向就是叉积结果的方向,所以使用左、右手就会得到不同的朝向,如下图:
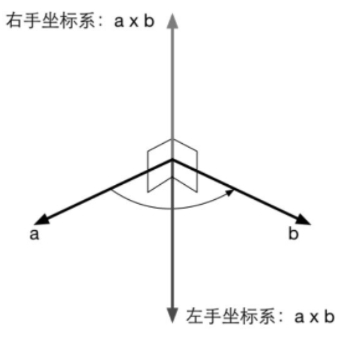
同理,左右手法则也通用可以用来判断,如下图:
矩阵
矩阵的定义
矩阵(Matrix),就是有m x n个标量组成的长方形数组,通常用方括号在左右两侧围住这些数字,大概像这样:
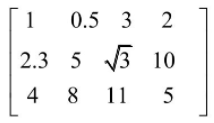
有些资料也会用圆括号或花括号,其实都一样的。
矩阵有行、列之分,上图的数组就是三行四列。以3x3矩阵为例,它可以写成:
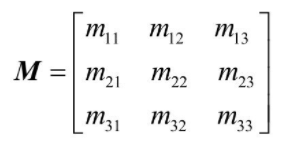
mij表示这个元素在矩阵M的第i行、第j列。
和矢量联系起来
矢量,我们通常写成:a = (x, y, z),可以看出矢量与矩阵一样,也是个数组。将矢量按照矩阵的写法,可以看成是n x 1的列矩阵或1 x n的行矩阵,n对应矢量的维度。
以矢量v = (3, 8, 6)举例,写成行矩阵:[3, 8, 6]
写成列矩阵:

为什么要和矢量联系起来?因为Shader中经常会将法线(矢量)进行坐标变换,而坐标变换是矩阵的几何意义,所以需要运用矩阵的运算来将法线从模型空间转变成世界空间。(后续会学到)
矩阵运算
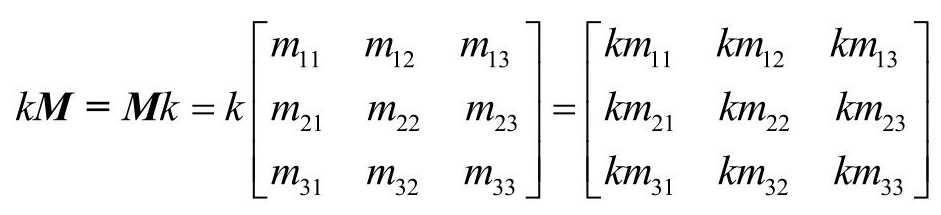
矩阵和标量的乘法
与矢量类似,矩阵和标量相乘后,结果仍然是一个矩阵。公式如下:
矩阵和矩阵的乘法
矩阵和矩阵相乘后,结果也是矩阵。新的矩阵的维度与两个原矩阵的维度有关。一个rxn的矩阵A和一个nxc的矩阵B相乘后,得到的结果AB是一个rxc大小的矩阵。需要注意,第一个矩阵的列数必须和第二个矩阵的行数相等,才能相乘。
比如:矩阵A的维度是4x3,矩阵B的维度是3x6,则AB的维度是4x6。
矩阵乘法的表达式:
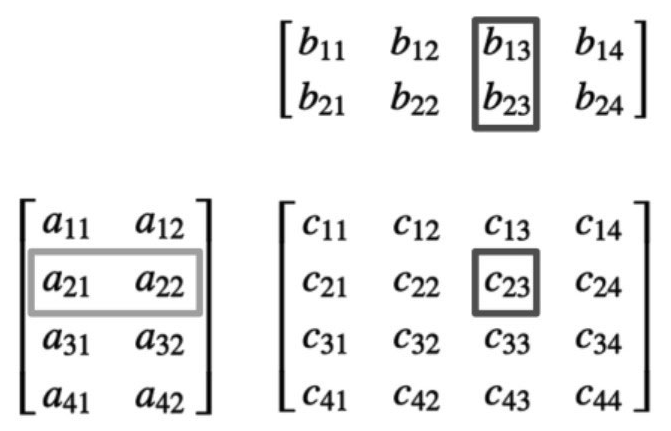
假设有rxn的矩阵A和nxc的矩阵B,相乘后得到一个rxc的矩阵C = AB,那么C中的每个元素Cij等于A的第i行所对应的矢量和B的第j列所对应的矢量进行点乘的结果,即:

简单解释为:
对于每个元素cij,找到A中的第i行和B中的第j列,把他们对应的元素相乘后再加起来,这个和就是cij。
性质一:
矩阵乘法不满足交换律:AB ≠ BA
性质二:
矩阵乘法满足结合律:(AB)C = A(BC)、ABCDE = ((A(BC))D)E = (AB)(CD)E
特殊的矩阵
方块矩阵
方块矩阵,简称方阵。指行数和列数相等的矩阵,比如:3x3、4x4的矩阵。
方块矩阵独有的:对角元素——行号和列号相等的元素。只有对角元素非0的矩阵叫对角矩阵。
单位矩阵
对角元素都为1的对角矩阵,叫做单位矩阵,用In表示,比如:
单位矩阵特性:任何矩阵和它相乘的结果还是原来的矩阵。相当于标量中1的地位。MI = IM = M
转置矩阵
转置矩阵实际是对原矩阵的一种运算,即转置运算。一个rxc的矩阵M,其转置表示成MT,是一个cxr的矩阵,本质是原来的矩阵行、列对换。
性质一:
矩阵转置的转置等于原矩阵。
(MT)T = M
性质二:
矩阵串联的转置,等于反向串联各个矩阵的转置。
(AB)T = BTAT
逆矩阵
只有方阵才有逆矩阵,逆矩阵表示为M-1。一个矩阵与它的逆矩阵相乘,结果是一个单位矩阵:
MM-1 = M-1M = I
有点标量里面倒数的味道。
不是所有方阵都有对应逆矩阵,比如:所有元素都为0的矩阵。
如果一个矩阵有对应的逆矩阵,则它是可逆的或非奇异性的;
相反,则它是不可逆的或奇异性的。
判断矩阵是否可逆:
矩阵的行列式不为0,则它是可逆的。
参考视频链接:https://www.bilibili.com/video/BV1aW411Q7x1?p=2
性质一:
逆矩阵的逆矩阵是原矩阵本身。
(M-1)-1 = M
性质二:
单位矩阵的逆矩阵是它本身。
I-1 = I
性质三:
转置矩阵的逆矩阵是逆矩阵的转置。
(MT)-1 = (M-1)T
性质四:
矩阵串联相乘后的逆矩阵等于反串联各个矩阵的逆矩阵。
(AB)-1 = B-1A-1
(ABCD)-1 = D-1C-1B-1A-1
矩阵的几何意义是变换,逆矩阵表示还原这个变换,或这个变换的反向变换。
使用变化矩阵M对矢量v进行一次变换,然后再使用逆矩阵M-1进行一次变换,会得到原来的矢量v。
M-1(Mv) = (M-1M)v = Iv = v
正交矩阵
正交矩阵是特殊的方阵。一个方阵M和它的转置矩阵的乘积是单位矩阵,则这个矩阵是正交的。
MMT = MTM = I
有逆矩阵的性质MM-1 = M-1M = I可以得出正交矩阵的逆矩阵是它的转置矩阵:
MT = M-1
正交矩阵可以用转置矩阵的运算代替逆矩阵的运算,因为逆矩阵计算更复杂。
怎样判定一个矩阵是正交矩阵?来看一下它有哪些定义。
因为:
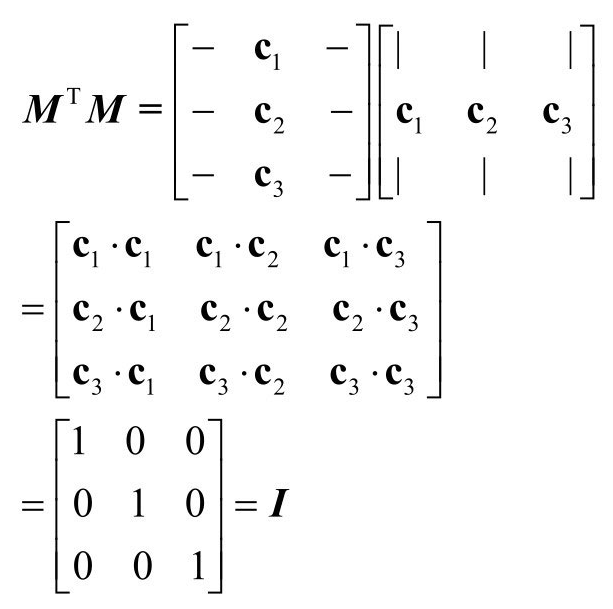
所以:
于是可以得到以下结论:
- 矩阵的每一行,即c1、c2、c3是单位矢量;(因为他们与自己的点积是1)
- 矩阵的每一行,即c1、c2、c3之间相互垂直;(因为他们的点积是0)
- 上述两条,对矩阵的每一列同样适用;(因为正交矩阵的转置通用是正交矩阵)
行矩阵还是列矩阵
一个矢量(比如:平行光的方向、表面发现方向),既可以写成行矩阵的形式,也可以写成列矩阵的形式,但是当它和矩阵相乘时,使用行矩阵还是列矩阵对其乘法的书写次序和结果值是有影响的。
假设有一个矢量v = (x, y, z),写成行矩阵是:v = [x y z],写成列矩阵是:v = [x y z]T(这里使用转置符号表示列矩阵的写法,纯粹为了排版)。另外有一个矩阵M:
当M和行矩阵相乘时,写法为:
vM = [xm11+ym21+zm31 xm12+ym22+zm32 xm13+ym23+zm33]
当M和列矩阵相乘时,写法为:
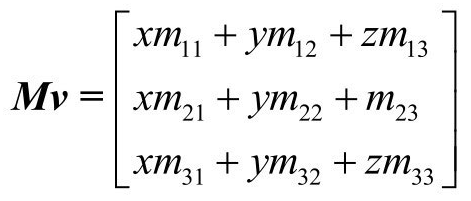
可以看到两者相乘的书写次序和结果里面元素也是不一样的。
Unity中通常把矢量当做列矩阵,所以相乘时,矢量是放在矩阵的右侧的,且阅读顺序也是从右到左。例如:
CBAv = (C(B(Av)))
表示先对v进行A矩阵变换,再进行B矩阵变换,最后进行C矩阵变换。

